Introduction
In geometry, a line segment is a part of a line that is bounded by two distinct end points, and contains every point on the line between its end points. A closed line segment includes both endpoints.
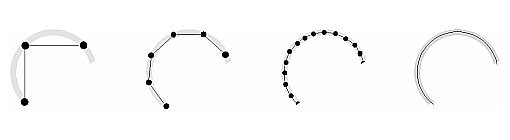
Line segments can be used to approximate smooth curves.
Line Segment Objects
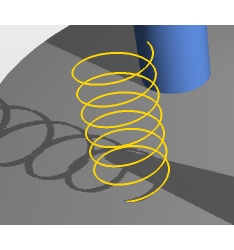
Creating a spring using an list of segments. See example 13-primitives
Similar to mesh objects, line segment models use vertices to describe all the lines that compose the objects. A finger-proxy algorithm is also used to compute all the interaction forces between the haptic tool and the object. A collision detection must also be initialized after all points have been created.
world->addChild(segments);
double h = 0.0;
double dh = 0.001;
double a = 0.0;
double da = 0.2;
double r = 0.05;
for (int i=0; i<200; i++)
{
double px0 = r * cos(a);
double py0 = r * sin(a);
double pz0 = h;
double px1 = r * cos(a+da);
double py1 = r * sin(a+da);
double pz1 = h+dh;
int index0 = segments->
newVertex(px0, py0, pz0);
int index1 = segments->
newVertex(px1, py1, pz1);
h = h + dh;
a = a + da;
}
segments->
m_material->setStiffness(0.5 * maxStiffness);

